- Home
- Huawei
- HCIP Intelligent Vision
- H12-521_V1.0
- H12-521_V1.0 - HCIP-Intelligent Vision V1.0
Huawei H12-521_V1.0 HCIP-Intelligent Vision V1.0 Exam Practice Test
HCIP-Intelligent Vision V1.0 Questions and Answers
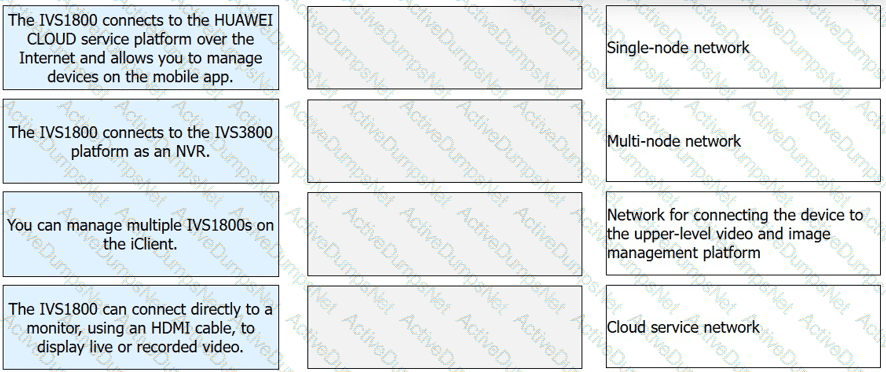
Match the following IVS1800 networks with their features:
Options:
Answer:
Explanation:
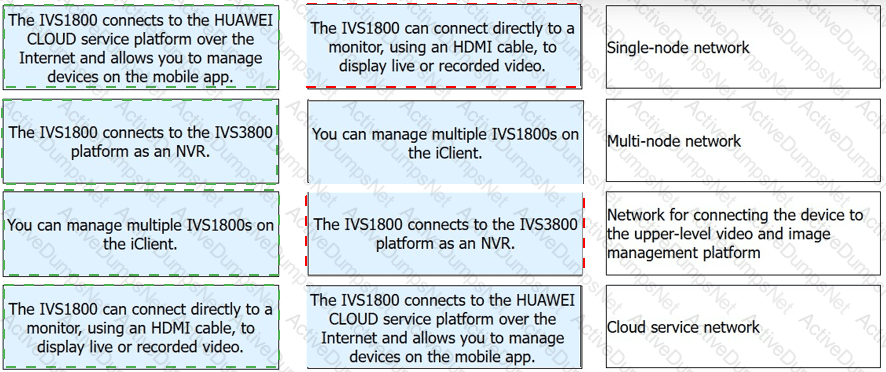
Cloud service network → The IVS1800 connects to the HUAWEI CLOUD service platform over the Internet and allows you to manage devices on the mobile app.
Network for connecting the device to the upper-level video and image management platform → The IVS1800 connects to the IVS3800 platform as an NVR.
Multi-node network → You can manage multiple IVS1800s on the iClient.
Single-node network → The IVS1800 can connect directly to a monitor, using an HDMI cable, to display live or recorded video.
The matching is based on the deployment role of each IVS1800 network type. The cloud service network is the mode used when the IVS1800 connects outward through the Internet to Huawei cloud services for remote device management, so it matches the feature about connection to the HUAWEI CLOUD service platform and mobile-app management. The network for connecting the device to the upper-level video and image management platform is the upstream integration path used when the IVS1800 works under a larger platform such as the IVS3800 , so that feature matches the statement about connecting to the IVS3800 platform as an NVR .
The multi-node network is intended for centralized management of multiple IVS1800 devices, which is why it matches the feature stating that multiple IVS1800s can be managed on the iClient . The single-node network is the standalone deployment model, so it matches the feature where the IVS1800 connects directly to a monitor through HDMI for local live or playback display. This mapping follows the standard Huawei deployment logic of standalone, clustered, upstream-integrated, and cloud-managed operation.
Which of the following is not an ONVIF standard?
Options:
Profile B
Profile T
Profile A
Profile S
Answer:
AExplanation:
The Open Network Video Interface Forum (ONVIF) provides a standardized framework for the interoperability of IP-based physical security products. These standards are organized into specific "Profiles" that define the features supported by devices and clients. Standard interfaces such as ONVIF are used to connect cameras to the IVS platform, facilitating a future-proof ecosystem where hardware from different vendors can communicate seamlessly.
Among the recognized standards, Profile S is the most common, used for basic video streaming and configuration. Profile T is a more modern standard designed for advanced video streaming, specifically supporting H.265 encoding and metadata reporting. Profile A is utilized for broader access control configurations, allowing for the integration of security management systems. Other profiles include Profile G for edge storage and Profile Q for quick installation. However, Profile B is not a recognized ONVIF standard profile. Adhering to these standardized formats ensures that recording streams can be accessed through external interfaces and that the system provides a channel for reporting metadata (structured data) for exchange with the platform, regardless of the underlying hardware differences.
Which of the following are cloud-edge synergy scenarios of Huawei JVS platforms?
Options:
The upper-level platform can deliver vehicle alert tasks to a lower-level platform.
Multiple cameras can collaborate with each other to recognize the same image.
The upper-level platform can centrally load, upgrade, and replace algorithms of both upper- and lower-level platforms.
The upper-level platform can apply for resources from a lower-level platform to perform intelligent analysis on video and images.
Answer:
A, C, DExplanation:
The correct answers are A, C, and D because cloud-edge synergy is defined as collaboration between a central platform and lightweight edges or other upper- and lower-level cloud domains. The material states that “Cloud-edge synergy: collaboration between the central platform and lightweight edges or other upper- and lower-level domains deployed on clouds” while separately identifying “Multi-camera Collaboration: Multiple cameras collaborate to identify same image” . This distinction is decisive: option B belongs to multi-camera collaboration, not cloud-edge synergy.
In practical JVS deployment, cloud-edge synergy includes centralized task orchestration, algorithm lifecycle management, and cross-domain resource coordination. That is why delivering vehicle alert tasks downward to lower-level platforms fits the model, and why centrally loading, upgrading, or replacing algorithms on upper- and lower-level platforms also fits. Likewise, when the upper-level platform applies for edge-side resources to perform intelligent analysis on video or images, it is using distributed resource collaboration, which is a classic cloud-edge function. Option B is excluded because it describes camera-to-camera cooperative recognition rather than platform-to-edge coordination. Therefore, the valid cloud-edge synergy scenarios are A, C, and D .
To increase the brightness of images captured by a camera, you can adjust the ( ) preferentially.
Options:
Resolution
Angle of view
Focal length
Iris
Answer:
DExplanation:
The correct answer is D because the iris directly controls the amount of light entering the lens, which has the most immediate effect on image brightness. When the iris opening is enlarged, more light reaches the image sensor, and the captured image becomes brighter. This makes iris adjustment the preferred action when the goal is simply to improve overall brightness. By contrast, resolution affects image detail, not light intake. Angle of view changes scene coverage, not exposure level. Focal length changes magnification and framing, but it does not function as the primary exposure control in this context.
This aligns with the exposure-centered logic emphasized throughout the training material, where Huawei highlights advanced imaging control and notes that “T-Shot, Huawei’s patented exposure technology, enables optimal imaging of targets and vehicles at the same time” and that traditional exposure methods cannot properly expose different targets in one image . In practical camera operation, brightness problems are first treated as an exposure issue, and among the listed options, the iris is the only parameter that directly regulates exposure by controlling incoming light.
Which of the following statements about the Huawei HoloSens iClient are correct?
Options:
The IP address for logging in to the iClient is the external service IP address of the VCNAPI if it is deployed in single-node system mode and the floating IP address if it is deployed in two-node cluster mode.
The iClient is applicable to various platform products, and you need to select the product during login.
Before configuring the intelligent analysis service on the iClient in platform mode, you need to configure the connection between the access platform and the analysis platform.
The connection between the access platform and the analysis platform only needs to be configured on the iClient.
Answer:
A, B, CExplanation:
The correct answers are A, B, and C . The login-address logic is consistent with Huawei platform addressing rules. The material states that when a service is deployed in clustered form, the floating IP must be used, for example: “If the BMU is deployed in two-node cluster mode, enter the external service floating IP address of the BMU” . That directly supports the cluster half of A , and the corresponding single-node logic uses the normal external service address rather than a floating address.
The iClient also works across multiple Huawei platform products, which is why product selection during login is required in practice. In addition, the inter-platform relationship must be established before intelligent analysis services can be configured in platform mode. The material explicitly states “Before connecting two domains with each other, configure the local domain code and external domain information on platforms in both domains” . This directly supports C and also proves why D is false: the connection is not configured only on the iClient; it must be configured on the involved platforms themselves. Therefore, A, B, and C are the correct statements.
In site planning principles, a observation circle is to enclose the target area to build a comprehensive and enclosed prevention and control system. For example, observation circles can be built for inter-city boundaries and a city's entrance/exit points.
Options:
TRUE
FALSE
Answer:
AExplanation:
The correct answer is A. TRUE . The idea of an observation circle in video site planning is to form a perimeter-style observation system around a protected area so that targets can be detected, tracked, and controlled at key boundary points. This matches the planning logic used in intelligent vision deployments, where site selection focuses on strategically important locations. The material identifies priority planning positions such as “Road intersections and entrances and exits” and “Key areas in cities” . These are exactly the kinds of points used to form an observation circle.
From a professional planning perspective, the observation circle concept is not just about placing cameras randomly; it is about creating an enclosed prevention-and-control framework by covering the external boundary and critical transition points of an area. Inter-city boundaries and city entrances or exits are typical examples because they are natural choke points for observation, vehicle monitoring, and event response. By surrounding the target area through layered site deployment, the system improves awareness, traceability, and early warning capability. Therefore, the statement correctly describes the purpose and example of an observation circle.
Before installing and deploying the IVS application, you need to disable the automatic backup function on the CSP OM portal to prevent installation failures caused by automatic backup.
Options:
TRUE
FALSE
Answer:
AExplanation:
The correct answer is A. TRUE . In IVS deployment practice, background maintenance tasks such as automatic backup can interfere with application installation, service initialization, database operations, and resource locking. For that reason, engineers typically disable automatic backup before beginning installation or deployment on the CSP OM portal. This is consistent with Huawei’s broader operation and maintenance logic, where management-plane activities on the CSP OM portal directly affect application deployment behavior. The material repeatedly uses the CSP OM portal as the control point for cluster and application configuration, for example when engineers need to view BMU-related service addresses through “Application Configuration > Configuration Management > Configuration > Application Name > Two-Node Cluster”
From an implementation perspective, installation requires a stable and uncontested environment. If an automatic backup starts during deployment, file operations, configuration updates, or service restarts may be interrupted, which can lead to incomplete installation or task failure. Therefore, disabling the automatic backup function before IVS installation is a valid preventive measure and should be regarded as a correct statement.
The system determines whether an object crosses the tripwire based on which of the following criteria?
Options:
Whether an object moves fast.
Whether an object crosses the tripwire in the specified direction.
Whether an object's movement trajectory intersects with the tripwire.
Whether an object is moving.
Answer:
CExplanation:
The correct answer is C because tripwire crossing detection is fundamentally based on analyzing the movement trajectory of an object relative to a predefined virtual line. In intelligent vision systems, the object is first detected, then tracked frame by frame, and its centroid positions are recorded to form a trajectory. The material explains that “A movement trajectory consists of positions of the centroid of a moving object in individual frames” and also states that “To accurately predict whether an object is likely to cross the tripwire, features need to be extracted from the object… Dynamic features: trajectory, speed, and direction. Tripwire crossing detection mainly involves the extraction of dynamic features of an object.”
This means the decisive event is whether the tracked path intersects the configured tripwire. Speed alone does not determine crossing, and simply being in motion is insufficient. Direction can be an additional filtering condition in some deployments, but the actual crossing judgment is established through trajectory analysis. Therefore, the system concludes that an object has crossed the tripwire when its motion trajectory intersects the tripwire line, making C the most accurate answer.
The foundation construction of a video site consists of the following nine parts: positioning and routing, foundation pit excavation, construction material entry, foundation pit bottoming, ground part connecting, template fixing, anchor bolt cage and PE pipe embedding, concrete casting, construction site maintenance, template removal, and muck backfilling.
Options:
TRUE
FALSE
Answer:
BExplanation:
The correct answer is B. FALSE . The statement is internally inconsistent because it says there are nine parts , but then lists more than nine items . More importantly, the construction sequence in the training material is described differently. The document states that civil engineering implementation includes “onsite measurement and routing, site arrangement, foundation pit excavation, lightning protection and grounding, foundation pit bedding, reinforced cage making, foundation template making, concrete casting, concrete maintenance, foundation pit backfilling, handhole making (optional), and trenching and cabling (optional)”
That official sequence does not match the wording in the question exactly. Terms such as construction material entry , ground part connecting , template removal , and muck backfilling are either not stated in the same form or are not presented as part of a fixed nine-step list. From a professional project-delivery viewpoint, foundation construction is indeed a staged civil process, but the exam statement is inaccurate because both the count and the listed procedure names do not align with the material. Therefore, the statement should be judged false.
The radar is placed right above the lane, and the detection direction is aligned with the position to be captured in the middle of the lane.
Options:
TRUE
FALSE
Answer:
BExplanation:
The correct answer is B. FALSE . The installation guidance in the material does confirm that radar is used in “highway scenarios and accurate speed estimation scenarios” and includes alignment steps such as “Adjust the bubble level. When the bubble is in the center, the radar is horizontal” . However, the statement is too absolute because it says the radar is placed right above the lane , which is not a general rule for radar deployment.
In real highway and checkpoint engineering, radar installation depends on the capture model, lane layout, pole position, and the coordination between radar and camera fields of view. The key requirement is that the detection area be aligned correctly with the intended capture zone, not that the radar must always be mounted directly above the lane center. Many practical deployments use side-mounted or offset positions on poles or beams so the radar can still cover the target lane accurately while matching the camera’s observation geometry. Since the essential requirement is proper alignment with the capture area rather than mandatory overhead placement, the statement as written is inaccurate.
Sites that use solar power supply do not need to connect to the mains. This solution is widely used in the main urban area.
Options:
TRUE
FALSE
Answer:
BExplanation:
The correct answer is B. FALSE . A solar-powered site may indeed reduce or eliminate dependence on mains in some deployment scenarios, but it is not accurate to say that this solution is widely used in the main urban area . In urban site planning, the material emphasizes checking whether mains is available , whether it is stable, and whether outages occur frequently, which shows that urban deployments are generally expected to have grid access and that power design is centered around existing mains conditions . The document also describes integrated power solutions using both solar energy and mains through technologies that “maximize energy efficiency of solar energy and mains and provide secure and reliable power supply”
From a planning perspective, pure solar solutions are more suitable where mains is unavailable, difficult to access, or unreliable, such as remote roads, islands, or isolated outdoor sites. Main urban areas usually already have grid infrastructure, making standalone solar less common as the default design choice. Urban systems more often use mains-based or hybrid schemes for reliability, maintenance convenience, and continuous service assurance. Therefore, the statement is false because the phrase “widely used in the main urban area” is inconsistent with the planning logic presented in the material.
A protection line is set up to record the location from which an object moves in or out of an area via monitoring methods.
Options:
TRUE
FALSE
Answer:
AExplanation:
The correct answer is A. TRUE . In intelligent vision and site planning, a protection line is a boundary-type monitoring rule used to determine whether a target enters or exits a defined space. This is consistent with the motion-analysis logic in the material, where behavior judgment is based on trajectories rather than isolated frames. The document explains that “A movement trajectory consists of positions of the centroid of a moving object in individual frames” and further states that “Tripwire crossing detection mainly involves the extraction of dynamic features of an object” such as trajectory, speed, and direction .
From an engineering viewpoint, a protection line is essentially a virtual line used to determine crossing behavior at the edge of a monitored zone. Once the moving object’s trajectory intersects that defined line, the system can judge whether the target is entering or leaving the designated area. This makes the protection line useful for event rules such as entry detection, exit detection, and boundary protection. Because the statement accurately reflects how a protection line records in-and-out movement locations using monitoring analysis, it is true.
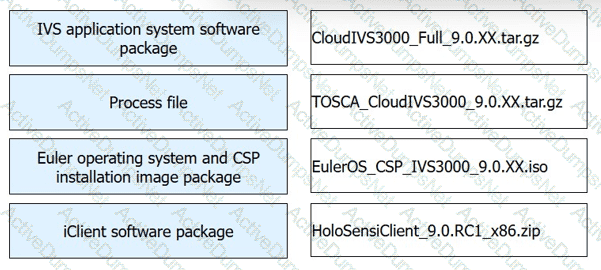
Match the following IVS3800 software packages with their most appropriate description.
Options:
Answer:
Explanation:
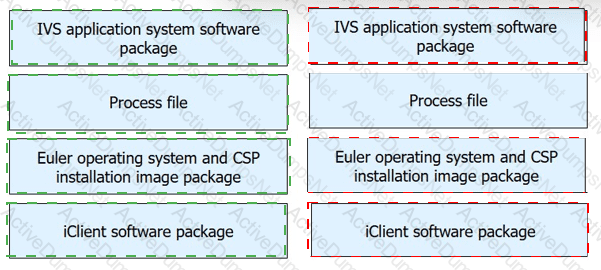
IVS application system software package → CloudIVS3000_Full_9.0.XX.tar.gz
Process file → TOSCA_CloudIVS3000_9.0.XX.tar.gz
Euler operating system and CSP installation image package → EulerOS_CSP_IVS3000_9.0.XX.iso
iClient software package → HoloSensiClient_9.0.RC1_x86.zip
The matching is determined by standard Huawei software package naming conventions used for IVS3800 and CloudIVS3000 deployment. The package named CloudIVS3000_Full_9.0.XX.tar.gz is the full IVS application system software package , because the keyword Full indicates the complete application deployment content. The TOSCA_CloudIVS3000_9.0.XX.tar.gz file corresponds to the process file , since TOSCA is used for orchestration and deployment workflow definition in Huawei platform installation. The EulerOS_CSP_IVS3000_9.0.XX.iso package is clearly the Euler operating system and CSP installation image package , as both EulerOS and CSP are explicitly named in the file. Finally, HoloSensiClient_9.0.RC1_x86.zip is the iClient software package , because HoloSens iClient is Huawei’s client-side operation and management application for the platform.
This mapping also follows the practical installation sequence. Engineers first prepare the operating system and CSP base image, then use the process file for orchestration, deploy the IVS application package, and finally install the iClient for platform access and configuration.
Which of the following operations cannot be performed when you adjust images in the web system of a PTZ dome camera?
Options:
Use the virtual joystick to adjust the camera's shooting direction
Switch the secondary stream type
Take snapshots
Perform electronic pan-tilt-zoom ePTZ operations
Answer:
BExplanation:
The correct answer is B because switching the secondary stream type is a stream configuration task, not an image-adjustment operation in the PTZ dome camera web interface. During image adjustment, the operator typically works with live-view and framing tools, such as directional control, local inspection, and capture assistance. That is why operations such as using a virtual joystick to move the PTZ direction, taking snapshots , and performing ePTZ for local image inspection fit naturally into image adjustment behavior.
The broader training content confirms that PTZ control belongs to live-view operation, stating that users can “perform PTZ controls … for example, control the PTZ direction, set PTZ preset positions, and set the home position” . That supports directional adjustment as a valid operation. A snapshot is also a live-view support function, while ePTZ is commonly used for image observation and local enlargement. However, secondary stream type belongs to video stream configuration, such as choosing or modifying stream properties, and is not part of direct image-adjustment handling. Therefore, the option that cannot be performed in image adjustment is B .
Which of the following is not a Lite Edge configuration scenario?
Options:
Fusion server that integrates storage, compute, and search capabilities
Storage server
Computer server + Search server
Storage server + Computer server + Search server
Answer:
BExplanation:
The correct answer is B because Lite Edge is designed as a container-based edge computing architecture that emphasizes service deployment, compute scheduling, and lightweight resource orchestration, rather than a storage-only deployment. The material explains that “The CSP and CSP Edge adopt a unified architecture to support the Central Cloud and Lite Cloud respectively” and further states that “The Lite Cloud integrates with the HASEN to implement container resource management and deployment” and “The container-based Lite Edge can schedule only CPU resources of single-node systems” . This makes it clear that compute capability is fundamental to Lite Edge scenarios.
From a solution-design perspective, Lite Edge can be deployed in integrated or combined modes, such as a fusion server or combinations involving compute and search , because intelligent services require application execution and scheduling resources. A storage-only server does not fit that functional model, since storage by itself cannot deliver edge-side intelligent service processing, search handling, or containerized application deployment. Therefore, while integrated and multi-role server combinations are valid Lite Edge configuration ideas, a standalone storage server is not considered a Lite Edge configuration scenario.
Which of the following measures cannot be used to protect camera cables against water?
Options:
Cut off unnecessary pigtail cables.
Wrap waterproof tape around the power cable.
Wrap three layers of waterproof tape around cable connectors.
Make a drip loop for cables.
Answer:
AExplanation:
The correct answer is A because cutting off unnecessary pigtail cables is not a valid waterproofing method and can actually compromise device integrity and long-term reliability. In installation practice, pigtails are retained as part of the camera’s original interface design, and the emphasis is placed on proper handling and protection , not removal. The material specifically warns that “When moving the devices, use hands and do not lift the pigtails” , which reflects that pigtails are treated as protected connection elements rather than disposable parts. It also stresses correct cable outlet orientation, for example, “The strobe light and flash light cannot be installed upside down. The cable outlet must be vertically at the bottom” , showing that water protection relies on installation method and cable routing.
From a field engineering perspective, waterproofing is achieved by sealing exposed connectors with waterproof tape, protecting cable joints thoroughly, and forming a drip loop so water flows away from the connector rather than into it. These are standard outdoor installation controls. Therefore, B, C, and D are all valid anti-water measures, while A is not.
Which of the following best describes the video synopsis function?
Options:
It enlarges a target in live video for clearer playback.
It fuses target trajectories and background images to generate a compact video.
It converts all video into still images for faster storage.
It only performs manual frame-by-frame search of recorded video.
Answer:
BExplanation:
The correct answer is B because video synopsis is designed to compress long-duration video into a shorter, information-dense presentation by extracting moving objects and reorganizing their activity over time. The material explains the workflow clearly: “Moving object detection involves algorithms such as background modeling, scene segmentation, and moving object extraction” , then “Object trajectory extraction involves object tracking algorithms such as TLD and KCF” , and finally “Generate a compact video. That is, fuse the target trajectory set and background image into frames, and combine frames into video”
This directly matches option B .
The same section also demonstrates the practical benefit by stating that “The video synopsis feature compresses the original 24-hour-long video into a 3.5-hour video”
From an intelligent vision operations perspective, this greatly improves investigation efficiency because users can review suspicious activity faster without watching the full original recording. Option A describes local zoom behavior, not synopsis. Option C is incorrect because synopsis does not turn video into still images. Option D is the opposite of synopsis, since synopsis reduces manual review effort rather than depending on it.
For a manual zoom camera, you can adjust the knob labeled N--F to ( ) and the knob labeled W--T to ( ).
Options:
Adjust the focal length; adjust the focus position
Adjust the focus position; adjust the focus position
Adjust the focus position; adjust the focal length
Adjust the focal length; adjust the focal length
Answer:
CExplanation:
The correct answer is C . In manual zoom lens terminology, N--F stands for Near to Far , which is the focus adjustment range, while W--T stands for Wide to Tele , which is the focal length or zoom adjustment range. This is standard optical-camera labeling and is consistent with the training material’s broader treatment of camera angle and image adjustment, where physical image tuning is performed through controlled mechanical or optical adjustment rather than through resolution changes alone. The material also shows that image framing and observation behavior depend on controlled camera adjustment, for example through tilt, horizontal, and vertical tuning during installation.
From an optical engineering standpoint, focus adjustment changes the sharpness plane of the subject, while focal length adjustment changes the field of view and magnification. Therefore, a technician first uses the W--T ring to set the desired scene scale and then uses the N--F ring to make the image sharp at the chosen distance. Since the question asks which function each labeled knob performs, N--F = adjust the focus position and W--T = adjust the focal length , making C the only correct option.
Unlock H12-521_V1.0 Features
- H12-521_V1.0 All Real Exam Questions
- H12-521_V1.0 Exam easy to use and print PDF format
- Download Free H12-521_V1.0 Demo (Try before Buy)
- Free Frequent Updates
- 100% Passing Guarantee by Activedumpsnet
Questions & Answers PDF Demo
- H12-521_V1.0 All Real Exam Questions
- H12-521_V1.0 Exam easy to use and print PDF format
- Download Free H12-521_V1.0 Demo (Try before Buy)
- Free Frequent Updates
- 100% Passing Guarantee by Activedumpsnet